電機的激勵順序
既然我們知道了一系列激勵會使步進電機旋轉,接下來就要設計硬件來實現(xiàn)所需的步進序列。一塊能讓電機動起來的硬件(或結合了硬件和軟件的一套設備)就叫做電機驅動器。
從圖4中可以看出我們怎樣激勵雙相電機的繞組才能使電機轉子旋轉,圖中,電機內的繞組抽頭分別被標為1A、1B、2A和2B。其中,1A和1B是繞組1的兩個抽頭,2A和2B則是繞組2的兩個抽頭。
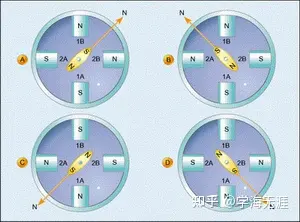
圖4 同時激勵電機的兩個繞組
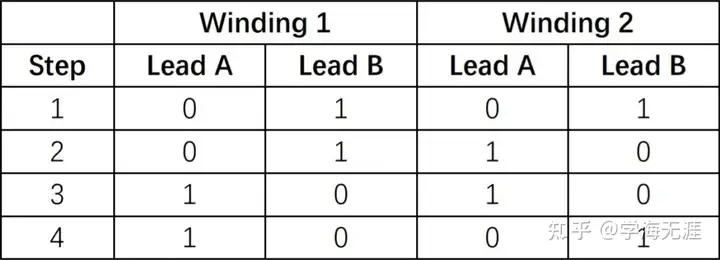
首先,要給腳1B和2B施加一個正電壓,并將1A和2A接地。然后,給腳1B和2A施加一個正電壓,而將1A和2B接地,這一過程其實取決于導線繞齒槽纏繞的方向,假設導線纏繞的方向與上一節(jié)所述相符。依次進行下去,我們就得到了表1中總結的激勵順序,其中,“1”表示正電壓,“0”表示接地。
電流在電機繞組中有兩種可能的流向,這樣的電機就叫做雙極電機和雙極驅動序列。雙極電機通常由一種叫做H橋的電路驅動,圖5給出了連接H橋和步進電機兩根抽頭的電路。
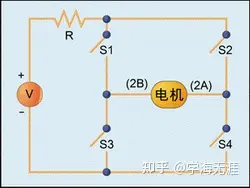
圖5 可用于驅動電機每個繞組的H橋電路
H橋通過一個電阻連接到一個電壓固定的直流電源(其幅度可根據電機的要求選取),然后,該電路再經過4個開關(分別標為S1、S2、S3和S4)連接到繞組的兩根抽頭。這一電路的分布看起來有點象一個大寫字母H,因此叫做H橋。
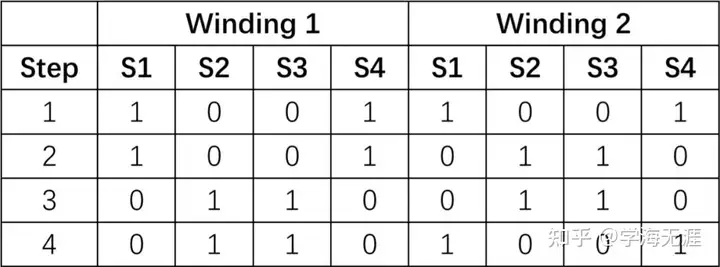
從表1中可以看出,要激勵該電機,第一步應將抽頭2A設為邏輯0,2B設為邏輯1,于是,我們可以閉合開關S1和S4,并斷開開關S2和S3。接著,需要將抽頭2A設為邏輯1,2B設為邏輯0,于是,我們可以閉合S2、S3,并斷開S1和S4。與此類似,第三步我們可以閉合S2、S3并斷開S1和S4,第四步則可以閉合S1、S4并斷開S2、S3。
表1 雙相電機動作過程中的繞組抽頭極性
對繞組1的激勵方法也不外乎如此,使用一對H橋就能產生需要的激勵信號序列。表2所示就是激勵過程中每一步開關所在的位置。
表2 雙相電機動作過程中開關的位置
注意,如果R=0,而開關S1和S3又不小心同時閉合,那么流經開關的電流將達到無窮大。這時,不但開關會被燒壞,電源也可能損壞,因此電路中使用了一個非零阻值的電阻。盡管這個電阻會帶來一定的功耗,也會降低電機驅動器的效率,但它可以提供短路保護。
前面我們已經討論了步進電機和步進驅動器。單極電機與雙極電機類似,不同的是在單極電機中外部能夠接觸到的只有每個繞組的中心抽頭,如圖6所示。我們將從繞組頂部抽出的抽頭標為抽頭B,底部抽出的標為抽頭A,中間的為抽頭C。
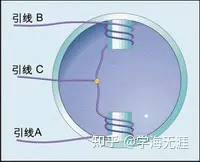
圖6 單極電機的結構
有時我們會遇到一些抽頭沒有標注的電機,如果我們清楚步進電機的構造,就很容易通過測量抽頭之間的阻值,識別出哪些抽頭屬于哪根繞組。不同繞組的抽頭之間阻抗通常為無窮大。如果經測量,抽頭A和C之間的阻抗為100歐姆,那么抽頭B和C之間的阻抗也應是100歐姆,而A和B之間的阻抗為200歐姆。200歐姆這一阻抗值就叫做繞組阻抗。
圖7給出一個單極電機的單相驅動電路。從中可以看出,當S1閉合而S2斷開時,電流將由右至左流經電機繞組;而當S1斷開,S2閉合時,電流流向變?yōu)橛勺笾劣摇R虼耍覀儍H用兩個開關就能改變電流的流向(而在雙極電機中需要4個開關才能做到)。表3所示為單極電機驅動電路中,每一步激勵時開關所處的位置。
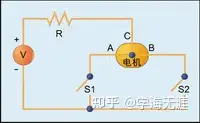
圖7 單極電機的控制電路
雖然單極電機的驅動器控制起來相對簡單,但由于在電機中使用了中心抽頭,因此它比雙極電機更復雜,而且其價格通常比雙極電機貴。此外,由于電流只流經一半的電機繞組,所以單極電機只能產生一半的磁場。
在知道了單極電機和雙極電機的構造原理之后,當我們遇到一個沒有標示抽頭也沒有數據手冊的電機時,我們就能自己推導出抽頭和繞組的關系。帶4個抽頭的電機就是一個雙相雙極電機,我們可以通過測量導線之間的阻抗來分辨哪兩個抽頭屬于同一個繞組。帶6個抽頭的電機可能是一個雙相單極電機,也可能是一個三相雙極電機,具體情況可以通過測量導線之間的阻抗來確定。
電機控制
本文前面討論的電機控制理論可以采用全硬件方案實現(xiàn),也可以用微型工控機或DSP實現(xiàn)。圖8說明了如何用晶體管作為開關來控制雙相單極電機。每個晶體管的基極都要通過一個電阻連接到微控制器的一個數字輸出上,阻值可以從1到10M歐姆,用于限制流入晶體管基極的電流。每個晶體管的發(fā)射極均接地,集電極連到電機繞組的4個抽頭。電機的中心抽頭均連接到電源電壓的正端。
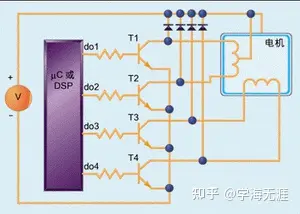
圖8
每個晶體管的集電極均通過一個二極管連接到電壓源,以保護晶體管不被旋轉時電機繞組上的感應電流燒壞。轉子旋轉時,電機繞組上會出現(xiàn)一個感應電壓,如果晶體管集電極沒有通過二極管連接到電壓源,感應電壓造成的電流就會涌入晶體管的集電極。
舉個例子,假設數字輸出do1為高而do2為低,于是do1會使晶體管T1導通,電流從+V流經中心抽頭和T1的基極,然后由T1的發(fā)射極輸出。但此時do2處于斷開狀態(tài),因此電流無法流經T2。這樣推理下去,我們就能清楚了解驅動電機所需的硬件和數字輸出的順序。然后就可以對最順手的微控制器或DSP編寫軟件,實現(xiàn)這些序列。
結 語
除了本文重點討論的雙相電機以外,步進電機還有其他類型,如直線絲桿步進電機,步進一體機。另外還有一些旋轉步進電機,它們只有一個中心抽頭,同時連接到兩個繞組的中心點,這類步進電機外部有5個抽頭引出。
同樣,步進電機也不是電機家族中的唯一成員,其他電機也有,直線絲桿電機,步進伺服,直流伺服電機等。早期的直流電機使用電刷,現(xiàn)在已經不再流行。如今常見的無刷直流電機,就是利用電子線路代替電刷進行換向的直流電機,這類電機中不存在電刷老化問題,因此其壽命比有刷直流電機長很多。
還有一種感應電機,其工作原理與步進電機或直流電機完全不同。直流電機采用的是直流電壓源,而感應電機則采用交流(AC)電壓源,并且步進電機和直流電機中轉子與定子磁場的旋轉是同步的,而感應電機中轉子的轉速滯后于定子磁場的轉速。
電話:0755-86548812
13828798216(趙先生)
傳真:0755-86648325
郵箱:sales@uimotion.com
網址:www.8m86.com.cn
地址:廣東省深圳市南山區(qū)南山大道1088號南園楓葉大廈5C
手機網站